Dedicated sections: Requirements, Documentation, Mechanics, Electronics, and Software
Please note. You can post Italian, English, German and Spanish language comments. English is the language to prefer.
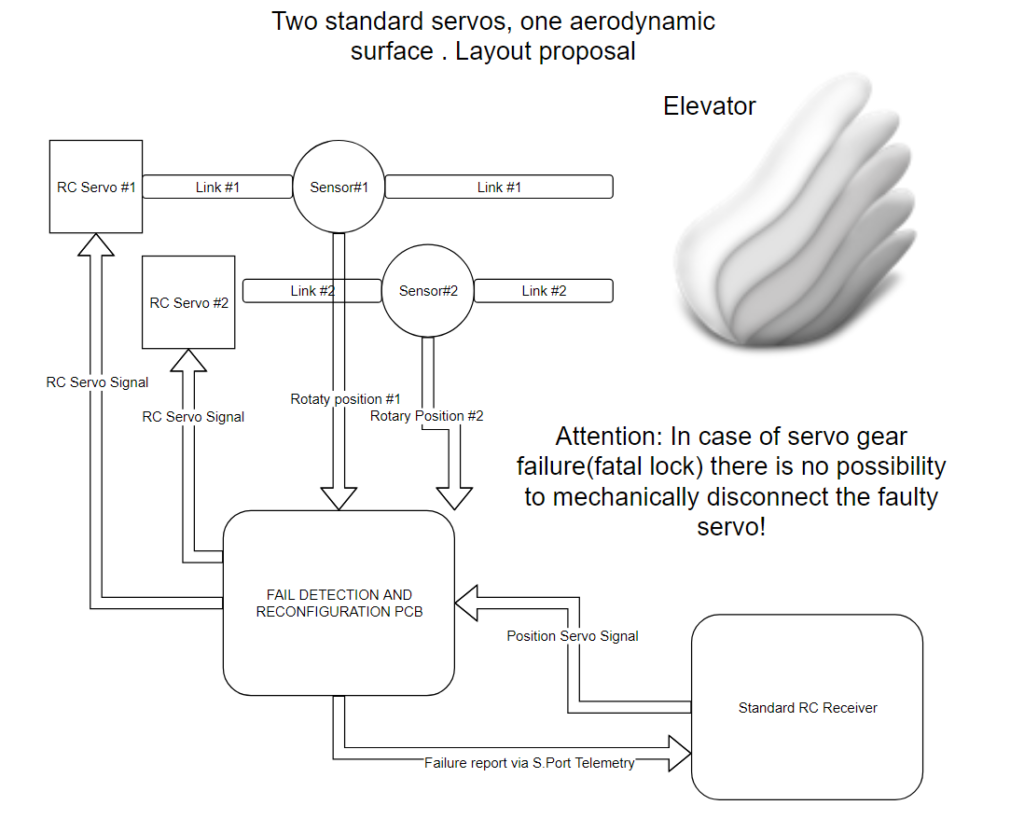
ALTERNATIVE APPROACH SUGGESTED BY MT: Instead of making a whole redundant servo from scratch. Provide a PCB that reads signals from the receiver and drives two/more standard RC servos, the board have also access to real-time position of the servos (pots?) You find a editable diagram here.
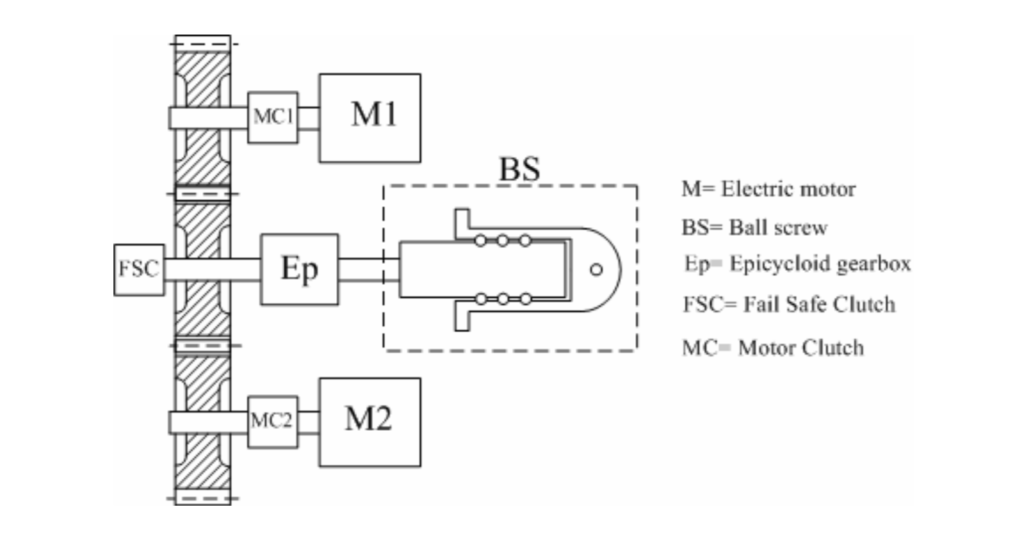
TO CHECK: Redundant gear train by NASA
What if a servo fail?
Reliability is a primary feature of actuators. No matter what vehicle are you using, a fast RC Jet, or a monster RC Car, soon or later you will think about safety 🙂
RC Modellers have tried different solutions to achieve a certain degree of actuators redundancy. Speaking of standard solutions there are a couple of common approaches
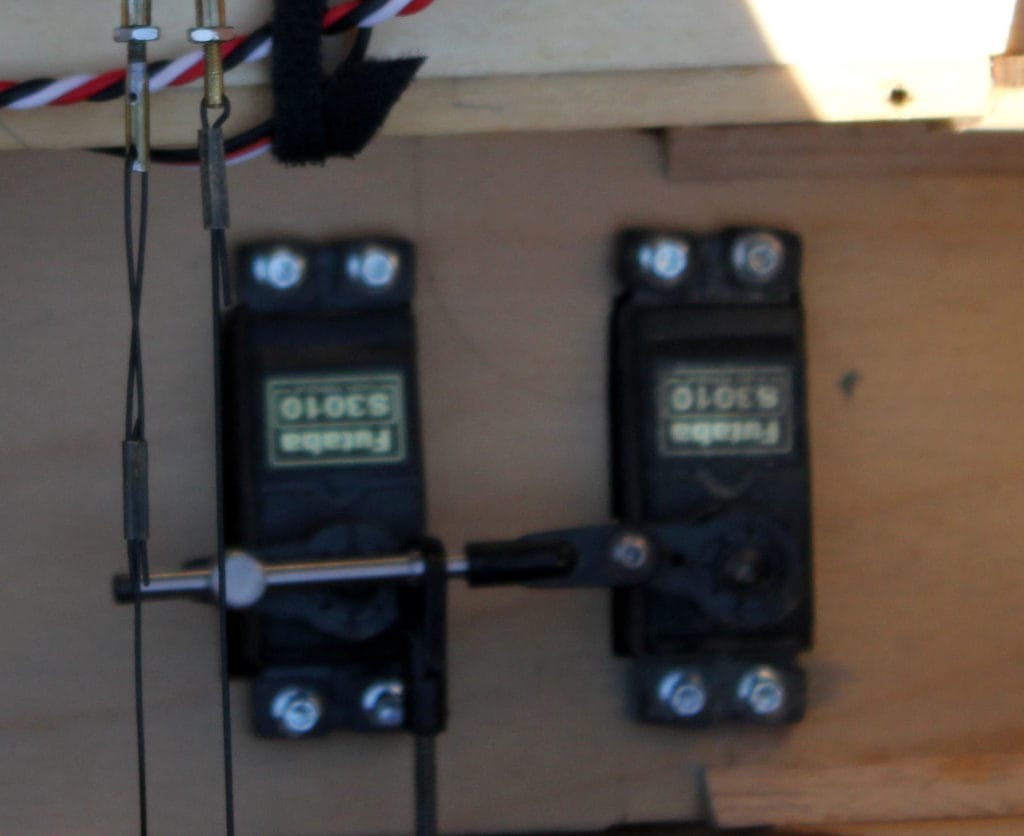
- Use two servos on the same control surface
- Use two servos mechanically bonded
Besides the failure of the servo motor, it is also possible that the servo drains a huge current amount, or worst that the power lines are shorted together; let’s call it an electronic failure.

If a servo short the power lines the voltage to other devices, including radio, will go immediately to 0 V. That will cause a total failure of all the installed servos.
To avoid this later issue it is possible to install commercially available servo interfaces or powerboxes.
So what?
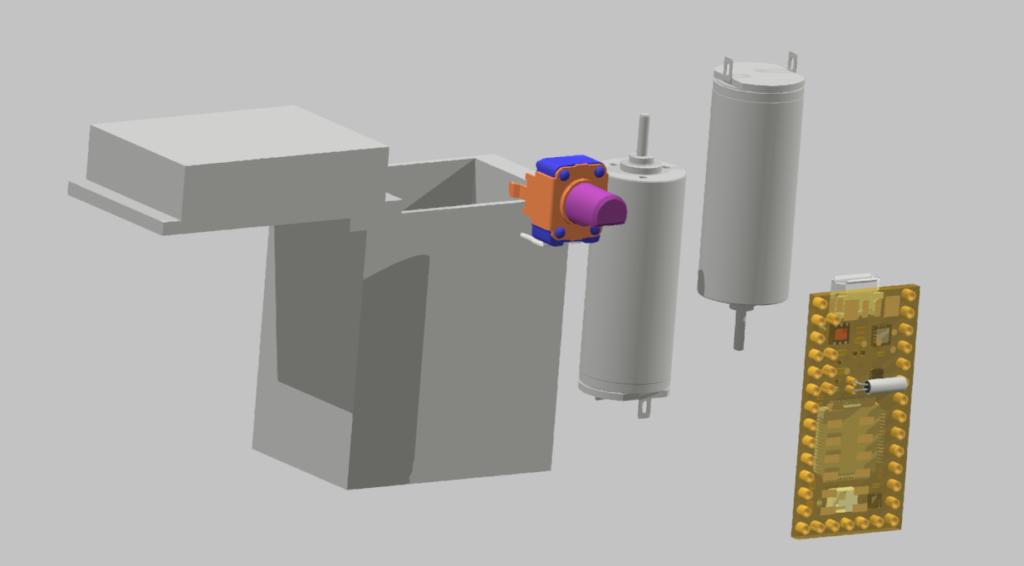
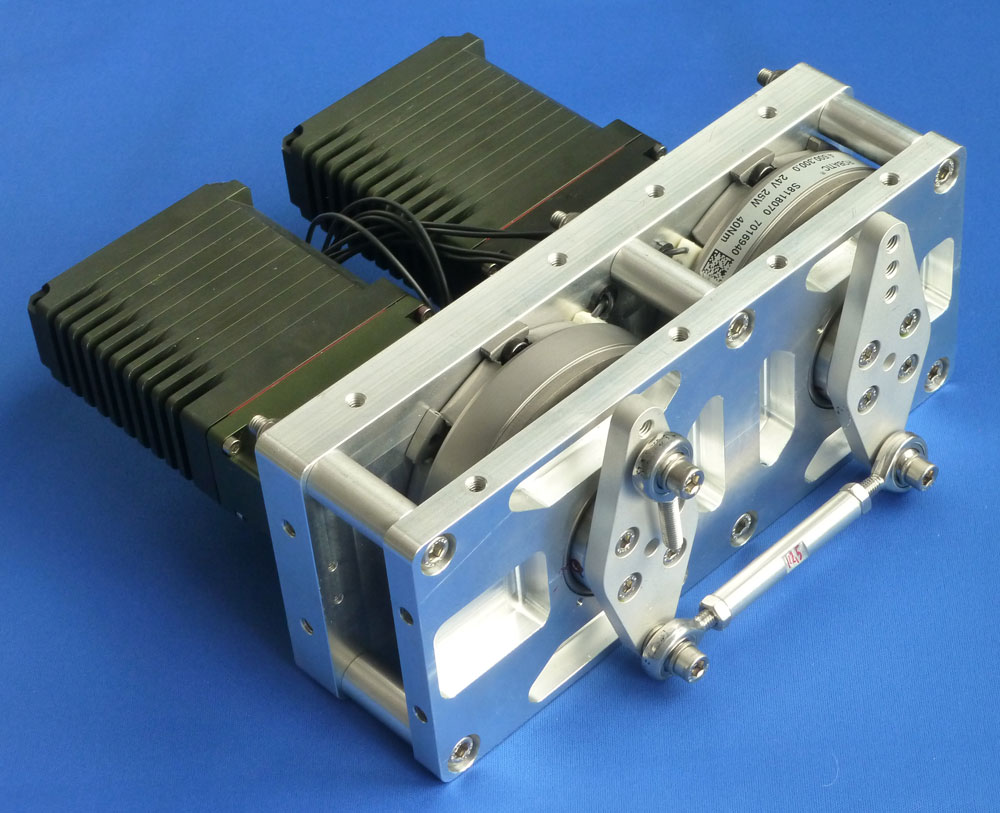
Basic Air Data team is thinking about to release a DIY design of a redundant servo. Anyone is free to join the development! We will update this page as we proceed
Interessant solutions and suggestions
Do you know a good solution, even a commercial solution? Post here your link!
0 Comments