This project is some year old, check in this link the new air data computer.
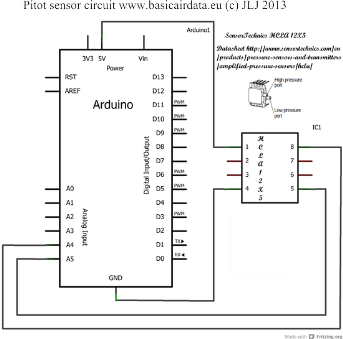
The simplicity of layout come straight from the main decision to use a fully digital platform. Main differential pressure sensor is from HCLA family from Sensortechnics, 12.5 mBar differential range (measuring range up to 42m/s) and one I2C digital interface.This sensor is light and with a small footprint and is fully internally compensated, with really good overall performances documented on the datasheet. Find the layout in Figure 1, the bill of materials is on the table TPI. 2. Selected Microcontroller is an Arduino 2009 operating at 5V.Proposed interface is quite easy to implement and have a minimun part count, have been used many times with the 8mm hemisphere head Pitot.The pressure sensor is simply connected to power @ 5V and hooked to Arduino SDA/SCL lines. With this configuration is possible to use an xbee wireless shield with no extra wiring, this modules can work in transparent mode and completely replace the serial connection.
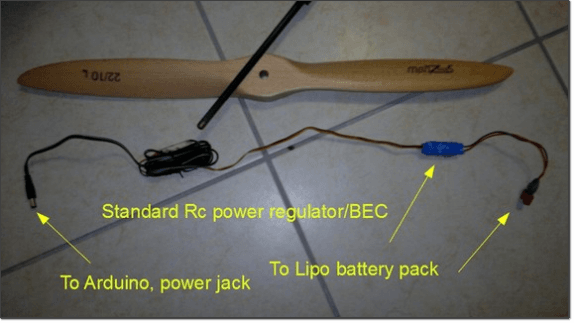
Figure 2 shows a common way to powering Arduino, if used in an RC vehicle it’s advisable to power up RX + Servo from a separate source of that used for non-primary electronic devices.
Regarding pressure lines connection remember the recomendations reported here. Using silicone tubing is not advisable at all, deformations lead to pressure changes. Use instead a pressure line made of rigid plastic material or metal, for example brass. Many producers of compressed air fittings have in their catalogs plastic tubes with outside diameter of 3/4 mm, often used in rc models for retractables landing gears.
Jump to firmware section to retrieve software for Pitot operation.
|
#Component |
Description |
Quantity |
|
1 |
8 bit micocontroller Arduino 2009, running @5V |
1 |
|
2 |
Sensortechnics HCLA 12X5, Bidirectional differential pressure sensor (-12.5 mBar, 12.5 mBar), running @5V, fully digital compensated |
1 |
|
3 |
Breadboard connection cables, check your connection but usually M/M |
4 |
|
4 |
USB A/B cable for Arduino 2009 |
1 |
|
5 |
1 |
|
|
6 |
Connection tubing OD 3/4 mm, if the dimension is not suitable with sensor connection nipple you can use a short transition joint made of silicone tube |
As short as pratical possible |
| Only if you want a wireless interface you need also: | ||
|
7 |
Xbee shield for Arduino 2009 |
1 |
|
8 |
Xbee module, one for arduino xbee shield and one for PC side |
2 |
|
9 |
Xbee USB interface, to be fitted on the usb PC port. |
1 |
|
10 |
Xbee USB interface cable, usually mini B |
1 |
|
11 |
Break away 90° right angle male headers |
1 |
|
12 |
5 volt, BEC battery eliminator circuit. Output 5 Volts, input as you want, 2 cell lipo is quite pratical to use |
1 |
|
13 |
2.1mm center-positive plug to power Arduino, to be welded to BEC |
1 |
|
14 |
Battery connector, as per your battery, to be welded to BEC |
1 |
TPI.2 – Bill of materials for proposed interface